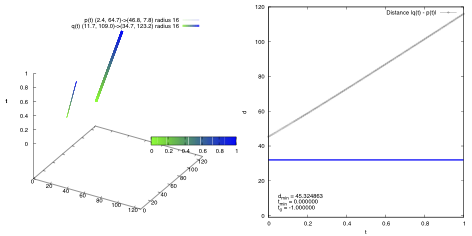
No collision.
From Collision.c; if you have Gnuplot, you can compile this and see,
t \in [0,1]
u = b - a
v = d - c
if(v-u ~= 0) t = doesn't matter, parallel
p(t) = a + (b-a)t
q(t) = c + (d-c)t
distance(t) = |q(t) - p(t)|
distance^2(t) = (q(t) - p(t))^2
= ((c+vt) - (a+ut))^2
= ((c-a) + (v-u)t)^2
= (v-u)*(v-u)t^2 + 2(c-a)*(v-u)t + (c-a)*(c-a)
0 = 2(v-u)*(v-u)t_min + 2(c-a)*(v-u)
t_min = -(c-a)*(v-u)/(v-u)*(v-u)
this is a linear optimisation; if t \notin [0,1] then pick the closest.
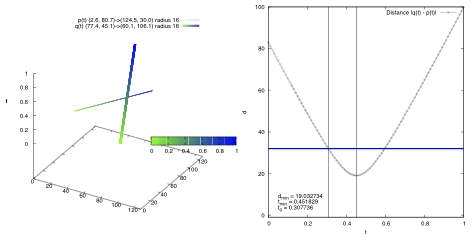
r is one-half the sum of the two radii; if the distance of closest
approach, distance^2(t_min) < r^2, then we have a collision, which
happened at t0,
r^2 = (v-u)*(v-u)t0^2 + 2(c-a)*(v-u)t0 + (c-a)*(c-a)
t0 = [-2(c-a)*(v-u) - sqrt((2(c-a)*(v-u))^2
- 4((v-u)*(v-u))((c-a)*(c-a) - r^2))] / 2(v-u)*(v-u)
t0 = [-(c-a)*(v-u) - sqrt(((c-a)*(v-u))^2
- ((v-u)*(v-u))((c-a)*(c-a) - r^2))] / (v-u)*(v-u)
| .. | Documents, including articles, coursework, stories, etc. |
π